
Пример 26. Шаговый двигатель и драйвер ULN2003
Примеры
СБОРНИК ПРИМЕРОВ


ПРИМЕРЫ
- Пример 1. Светодиоды
- Пример 2. Подключение кнопки
- Пример 3. Переключатель
- Пример 4. Активный зуммер
- Пример 5. Пассивный зуммер
- Пример 6. Фоторезистор
- Пример 7. RGB-светодиод
- Пример 8. Семисегментный индикатор и 74HC595N
- Пример 9. Четырехразрядный 7-сегментный индикатор
- Пример 10. Светодиодная матрица
- Пример 11. Светодиодная шкала
- Пример 12. ЖК-дисплей
- Пример 13. Джойстик
- Пример 14. Вольтметр
- Пример 15. Термистор
- Пример 16. Модуль DHT11
- Пример 17. Модуль HC-SR04
- Пример 18. Датчик движения HC-SR501
- Пример 19. Матричная клавиатура
- Пример 20. ИК датчик и пульт
- Пример 21. Модуль часов DS-1302
- Пример 22. RFID-модуль RC522
- Пример 23. Сервопривод
- Пример 24. Модуль реле
- Пример 25. Двигатель постоянного тока
- Пример 26. Шаговый двигатель и драйвер ULN2003
- Пример 27. Драйвер двигателей на L298N
- Пример 28. MP3-плеер DFPlayer Mini
- Пример 29. Датчик уровня воды
- Пример 30. Serial Port
- Пример 31. Симуляция парковки
- Пример 32. Датчик температуры DS18B20
- Пример 33. Bluetooth-модуль HC-06
- Пример 34. Плата расширения с дисплеем и кнопками
- Пример 35. Плата расширения для двигателей на L293D
- Пример 36. Ethernet шилд W5100
- Пример 37. GSM/GPRS шилд SIM900
- Пример 38. GPS модуль Ublox NEO-6M
- Пример 39. Модуль считывания отпечатков пальцев
- Пример 40. Шаговый двигатель NEMA17 и драйвер TB6600
Подобная конструкция позволяет реализовать очень точное управление углом поворота ротора шагового двигателя относительно катушек – статора. Можно выделить два основных типа шаговых моторов: униполярные и биполярные шаговые двигатели.
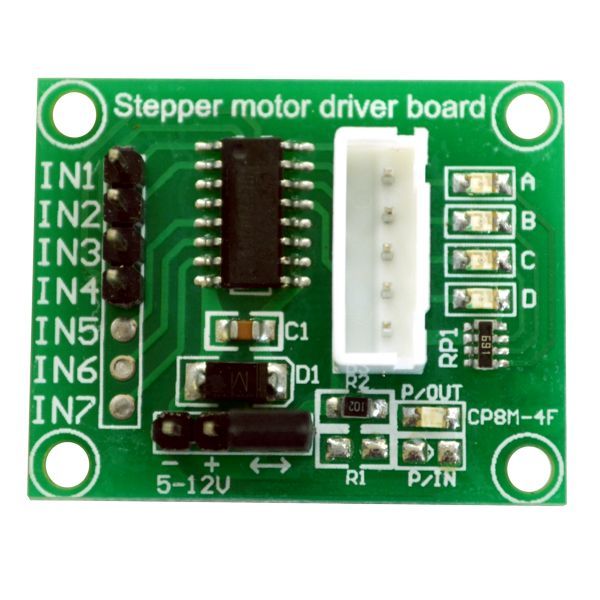
В данном примере мы рассмотрим работу униполярного шагового двигателя 28-BYJ48 с драйвером ULN2003.

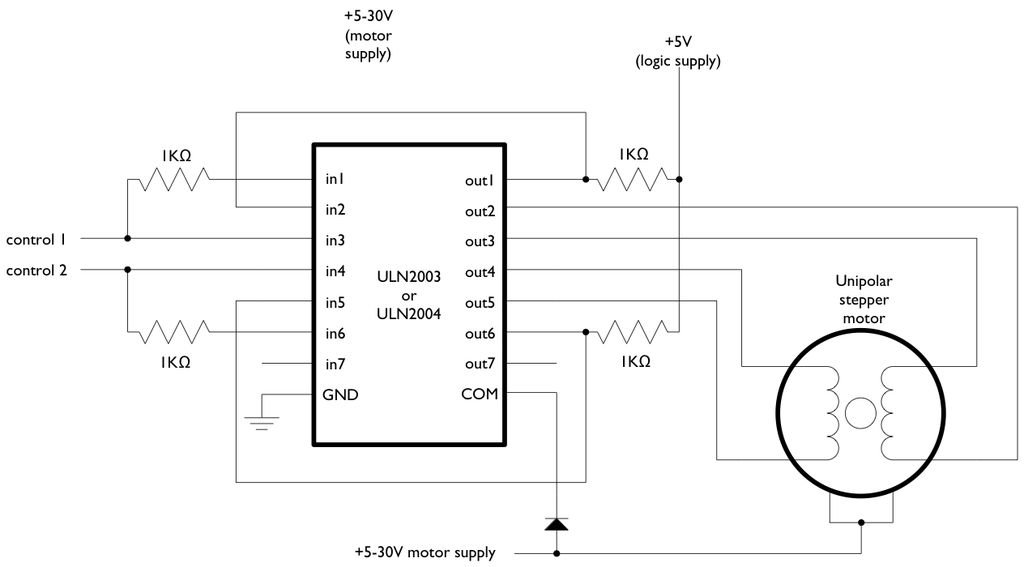
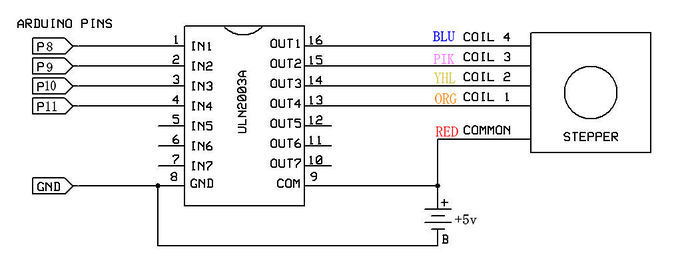
Внешний вид и схемы подключения ULN2003 приведены на изображениях ниже.
Описание:
Модуль драйвера шагового двигателя ULN2003 подключается к Arduino контактами IN1 – IN4 к D8 – D11 соответственно. Для подачи питания на мотор, рекомендуется использовать внешний источник питания 5 В с силой тока 500 мА. Вал шагового двигателя в результате выполнения данного примера будет делать один полный оборот в одну сторону, затем в обратную.
Компоненты:
Схема:

Скетч:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 |
#define IN1 2 #define IN2 3 #define IN3 4 #define IN4 5 int Steps = 0; boolean Direction = true; unsigned long last_time; unsigned long currentMillis; int steps_left=4095; long time; void setup(){ Serial.begin(115200); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); // delay(1000); } void loop(){ while(steps_left>0){ currentMillis = micros(); if(currentMillis-last_time>=1000){ stepper(1); time=time+micros()-last_time; last_time=micros(); steps_left--; } } Serial.println(time); Serial.println("Wait...!"); delay(2000); Direction=!Direction; steps_left=4095; } void stepper(int xw){ for (int x=0;x<xw;x++){ switch(Steps){ case 0: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); break; case 1: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, HIGH); break; case 2: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); break; case 3: digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); break; case 4: digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 5: digitalWrite(IN1, HIGH); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 6: digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 7: digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); break; default: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; } SetDirection(); } } void SetDirection(){ if(Direction==1){ Steps++;} if(Direction==0){ Steps--; } if(Steps>7){Steps=0;} if(Steps<0){Steps=7; } } |