
Сервопривод
Теория
КОМПОНЕНТЫ
- Адресуемая светодиодная лента
- Геркон
- Диод
- Зуммер
- Кнопка
- Кварцевый резонатор
- Конденсатор
- Макетная плата
- Резистор
- Реле
- Светодиод
- Светодиодные индикаторы
- Сервопривод
- Симистор
- Транзистор
ARDUINO
- Что такое Arduino?
- Среда разработки Arduino IDE
- Сравнение плат Arduino. Какую выбрать?
- Как прошить плату Arduino с помощью другой Arduino (ArduinoISP)
- Онлайн-сервис TinkerCAD – эмулятор Arduino
- Визуальная среда разработки Mixly для Arduino
- Настройка поддержки чипа STM32F103C8T6 средой Arduino IDE
RASPBERRY
ИНТЕРФЕЙСЫ ПЕРЕДАЧИ ДАННЫХ

Общее устройство и принцип работы
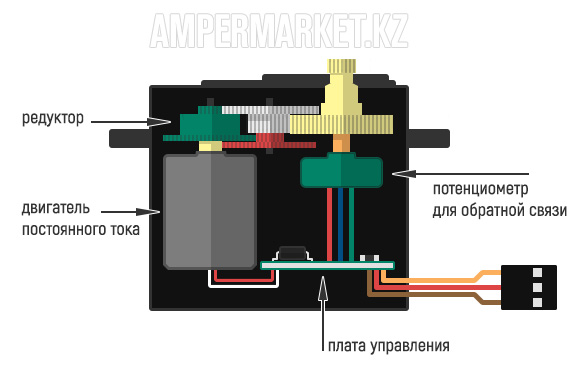
Важным моментом здесь является то, что длительность импульсов обратной связи регулируется встроенным потенциометром, положение вала которого устанавливается валом двигателя через зубчатую передачу: куда вал двигателя, туда и ручка потенциометра. Таким образом за любом движением вала двигателя последует изменение длины импульсов сигала обратной связи. Эта сцепка и образует обратную связь. Увидеть ее можно на схеме устройства серводвигателя выше.
Направление вращения вала двигателя задается полярностью напряжения сигнала.
Основные характеристики сервоприводов
Тип сервопривода: аналоговые и цифровые
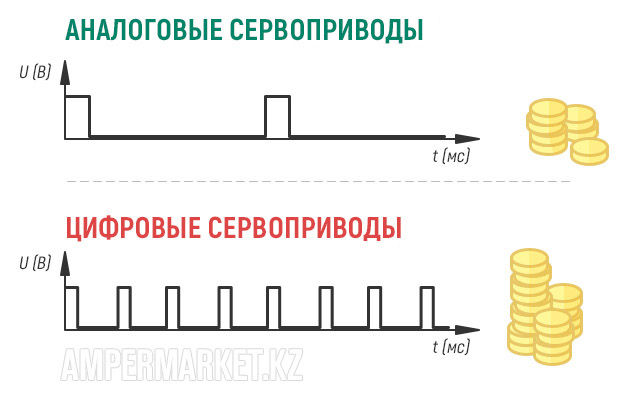
Большинство аналоговых моделей, в силу особенностей устройства плат их управления, способны принимать и обрабатывать управляющие импульсы с частотой 50 Гц, то есть каждые 20 мс. Как следствие и сигналы на двигатель тоже отправляются каждые 20 мс. Это значит, что чем ближе вал к своему «пункту назначения», заданному управляющим ШИМ сигналом, тем слабее сигнал, посылаемый на двигатель, ведь длина его импульсов сокращается по мере приближения к заданной позиции. Поэтому при малых отклонениях двигатель уже не может развивать большой момент силы. Кроме того нельзя забывать про наличие у сервоприводов «мертвых зон».
В цифровых сервоприводах эти недостатки в значительной степени устраняются доработкой платы управления, а именно – применением специальных микроконтроллеров. Данное техническое решение позволяет увеличить частоту сигналов до 200 Гц и более. В результате сервопривод становится более шустрым: быстрее реагирует на внешние воздействия и развивает необходимый крутящий момент, мертвые зоны становятся намного короче.
Цифровые сервоприводы решают проблемы, связанные с низкой частотой сигналов, но вместе с тем становятся сложнее в производстве, а потому – дороже. Кроме того они потребляют больше энергии, чем аналоговые.
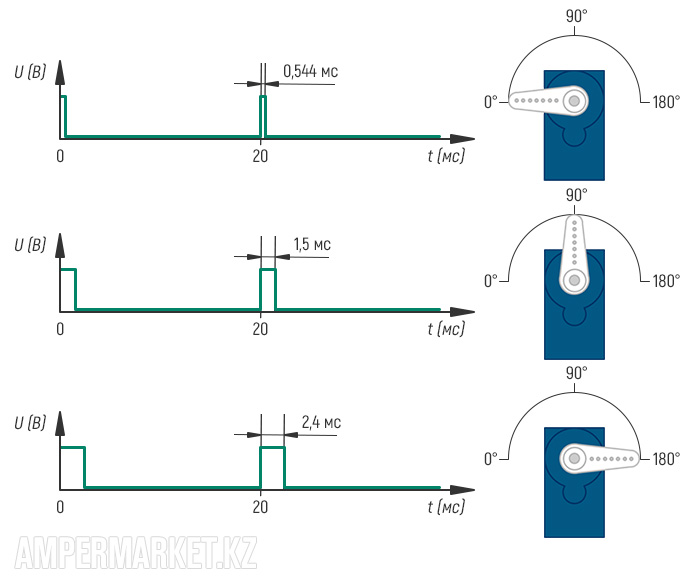
Угол поворота
Момент силы (крутящий момент)
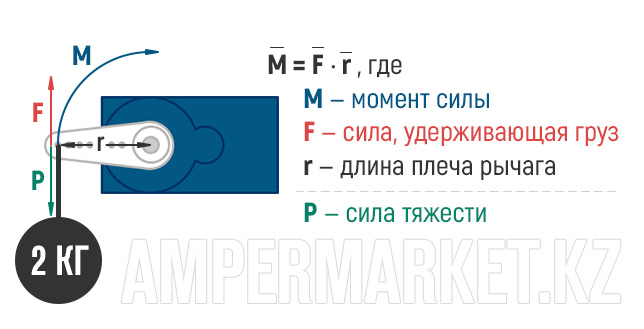
Более строгая формулировка звучит следующим образом: момент силы есть векторная физическая величина, равная векторному произведению вектора силы и радиус-вектора, проведённого от оси вращения к точке приложения этой силы. Характеризует вращательное действие силы на твёрдое тело.
Единица измерения данной величины в системе СИ — ньютон-метр [Н∙м], но на практике часто можно встретить другую единицу — килограмм-силы-сантиметр [кгс∙см]. Также кгс∙см часто записывают как кг∙см.
1 кгс∙см ≈ 0,098 Н∙м.
Скорость
Стоит отметить, что обычно более скоростные приводы имеют меньший момент силы, и наоборот – более мощные серводвигатели крутятся медленнее, чем менее мощные.
Мертвая зона
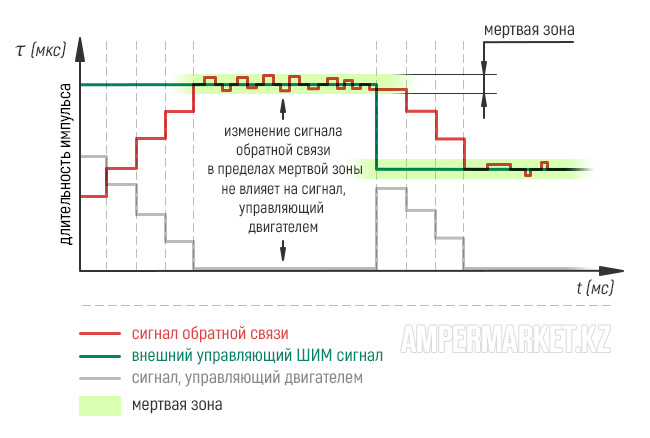
Обычно «ширина» мертвой зоны указывается в микросекундах. Например, наличие мертвой зоны в 4 мкс говорит о том, что всякая разность импульсов управляющего сигнала и сигнала обратной связи короче 4 мкс будет игнорироваться платой управления и не будет приводить к генерации сигнала управления двигателем.
Тип электродвигателя
Мотор с редечником. Самый доступный по цене тип двигателей, однако из-за того, что ротор данных двигателей обычно разбит на секции, данные двигатели могут вибрировать во время работы, и не отличаются высокой точностью.
Мотор без сердечника. Ротор этих двигателей не разделен на секции и, как следствие, может работать без вибраций и более точно, чем обычные моторы с сердечником. Также ротор у данного типа двигателя полый, что значительно уменьшает вес конструкции. Повышенная точность, стабильность работы и малый вес являются неоспоримыми преимуществами перед моторами с сердечником, но и цена за такой мотор будет выше.
Бесколлекторный мотор. Такие моторы обладают всеми положительными качествами моторов без сердечников, но к тому же способны развивать в тех же условиях более высокие скорость и крутящий момент, но и обойдутся они дороже.
Материал элементов редуктора
Пластиковый редуктор. Чаще изготавливается из силикона. Силиконовые шестерни слабо подвержены износу, имеют малый вес и довольно дешевы. Это делает их довольно популярными в любительских и учебных проектах, а так же там, где не предполагаются большие нагрузки на механизм. Большие нагрузки – слабое место пластиковых редукторов.
Металлический редуктор. Такие редукторы тяжелее и дороже, а также менее износостойки, чем силиконовые, но зато способны выручить там, где предполагаются нагрузки непосильные для силиконовых. Поэтому более мощные двигатели обычно оснащаются именно металлическим редуктором.
Карбоновый редуктор. Карбоновые редукторы объединяют в себе легкость, прочность и износостойкость. Поэтому главным их недостатком остается довольно высокая цена.